FPV Part Picker & Build Planner
A full-stack configuration and build planning platform for FPV drone hobbyists, featuring an automated, server-side rule validation architecture to guarantee part compatibility.
Project Overview & Features
- Automated Compatibility Engine: Evaluates active builds against strict electronic and structural thresholds (e.g., cell count, digital/analog protocols).
- Dynamic Specification Parsing: Employs C# reflection to adaptively scan hardware properties without rigid structural coupling.
- Relational Architecture: Fully synchronized parts directory backed by a cloud-native database instance.
- Cloud Native Lifecycle: Built with containerized staging configurations and microservices infrastructure.
Skills & Technologies Applied
Workflow & Tools
Video Walkthrough
System Integration & Deployment
Application Dashboard
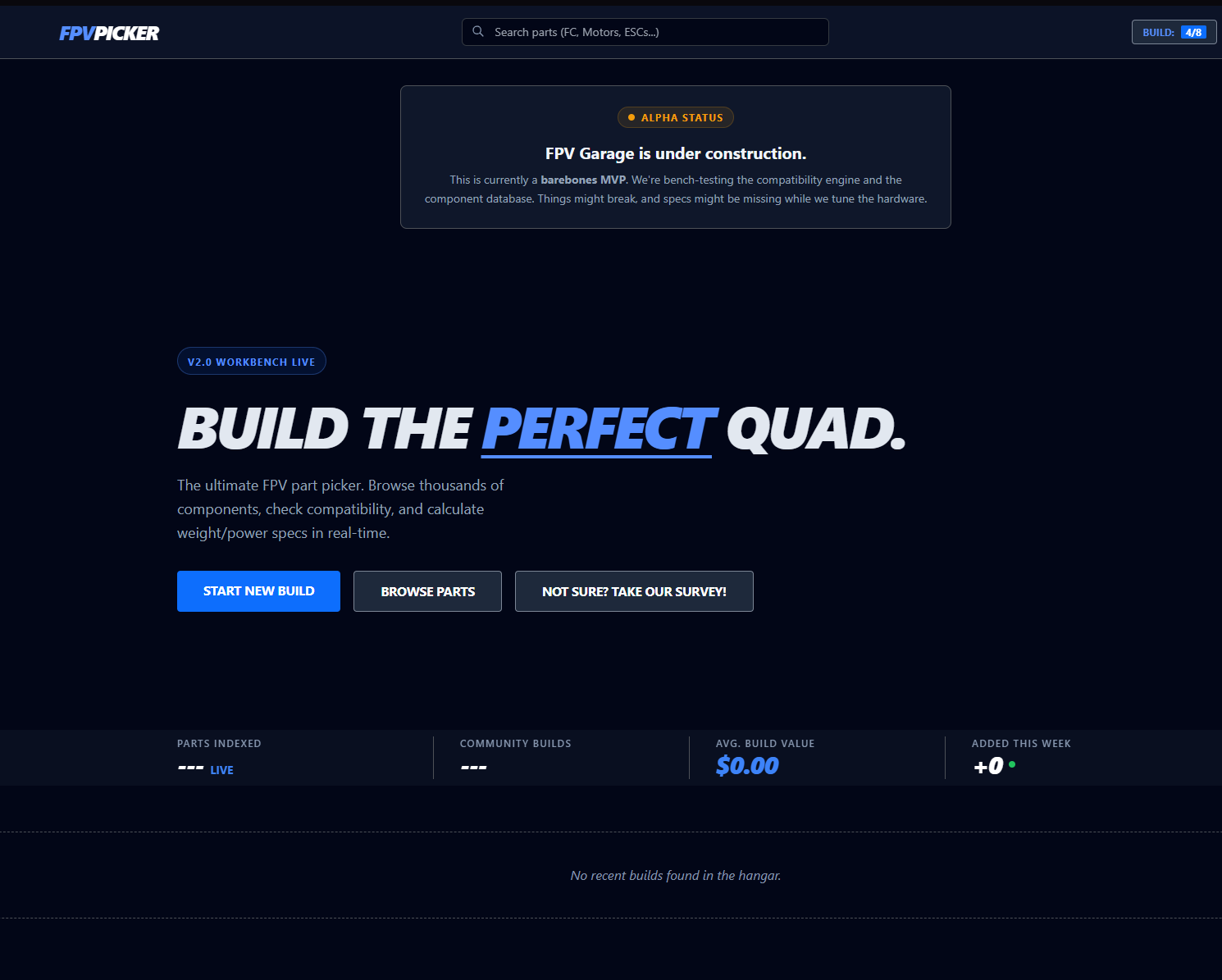
The primary interface for components tracking, custom builds creation, and live compatibility logging.
Neon Cloud Database
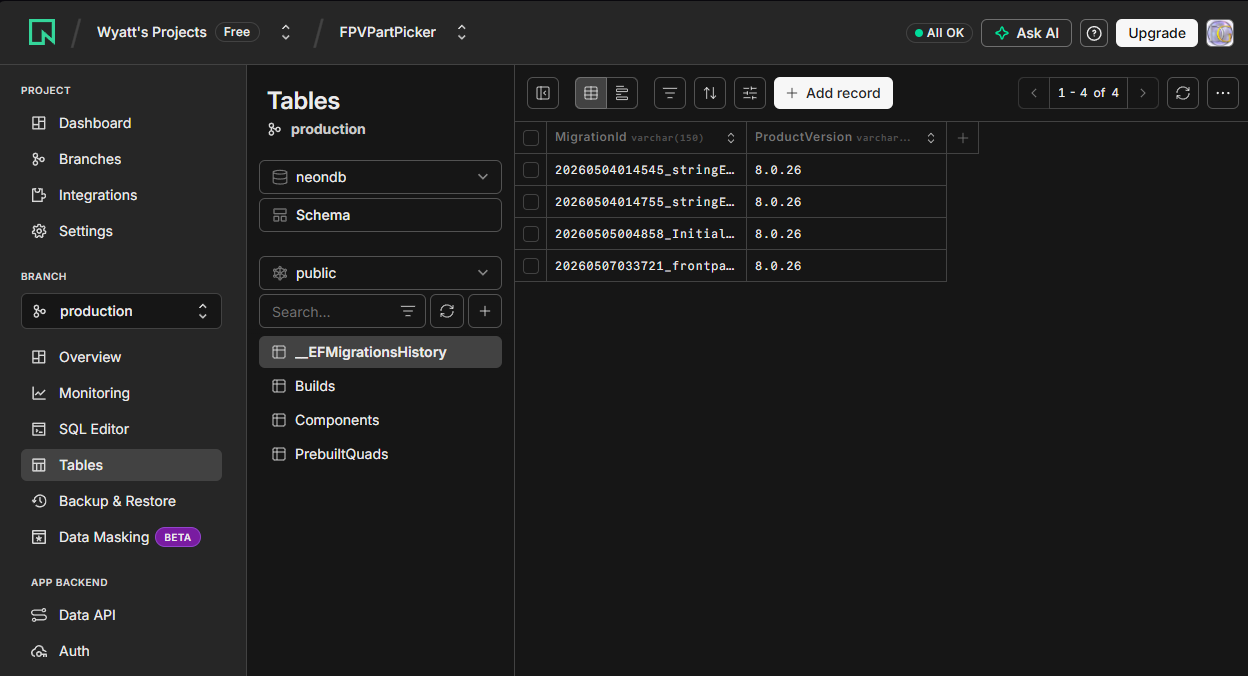
Serverless PostgreSQL clustering on Neon DB managing component schemas and user-generated build configurations.
Railway Cloud Engine
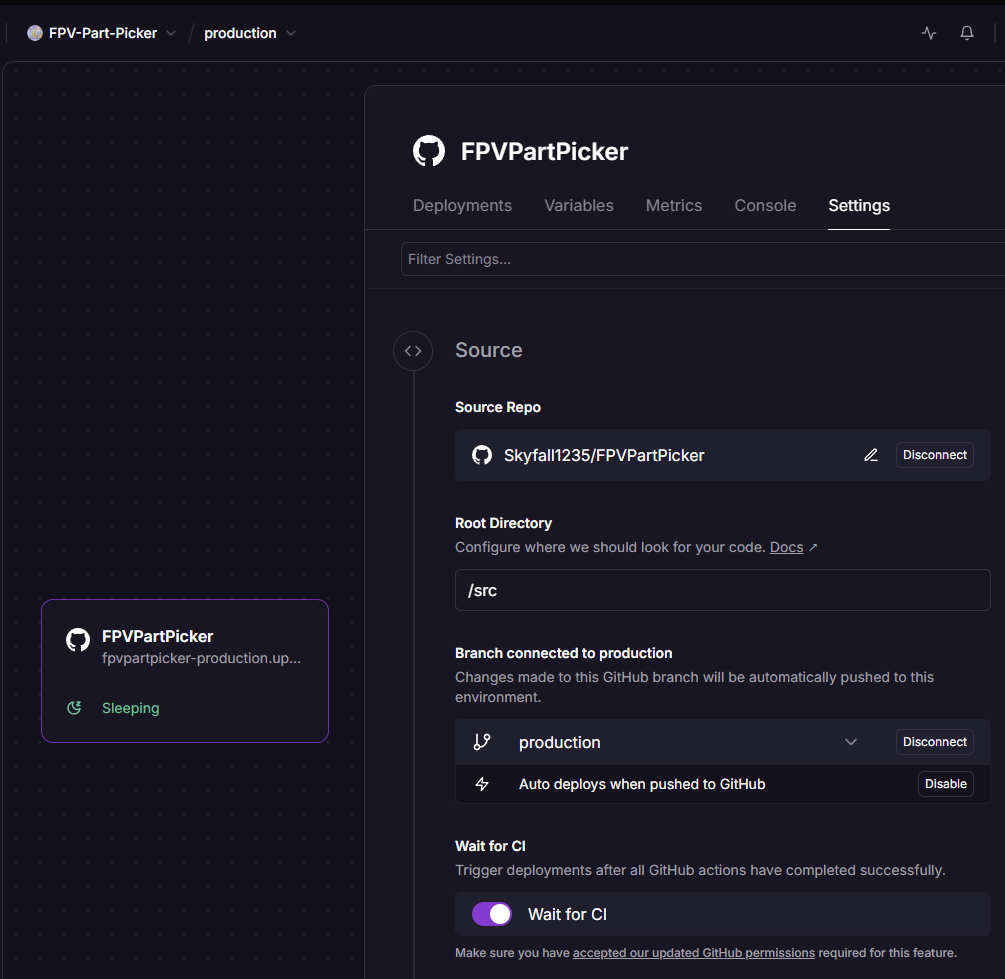
Continuous automated container deployments linked directly with production code repositories via Docker.
Core Engineering Architecture
Dynamic Configuration Rules
public static CompatibilityRule VoltageMatchingCheck => new()
{
Name = "Voltage (S) Match",
Message = "One or more components are not rated for the battery cell count (S).",
Severity = RuleSeverity.Error,
Check = (parts) =>
{
var battery = parts.FirstOrDefault(p => p.Category == ComponentCategory.Battery);
if (battery == null) return true;
var bSpecs = SpecValidator.GetTypedSpecs(battery) as BatterySpecs;
var cellCount = bSpecs?.CellCount ?? 0;
foreach (var part in parts)
{
var dynamicSpecs = SpecValidator.GetTypedSpecs(part);
var maxS = dynamicSpecs?.GetType().GetProperty("MaxS")?.GetValue(dynamicSpecs) as int?;
var minS = dynamicSpecs?.GetType().GetProperty("MinS")?.GetValue(dynamicSpecs) as int?;
if (maxS.HasValue && cellCount > maxS.Value) return false;
if (minS.HasValue && cellCount < minS.Value) return false;
}
return true;
}
};
This verification routine evaluates electrical loads across different parts. By accessing properties through runtime reflection, the rule evaluates safety parameters like cell counts (MaxS / MinS) without hardcoding explicit models for every single peripheral component type.
Video Protocol Interoperability
public static CompatibilityRule VideoSystemMatch => new()
{
Name = "Video System Protocol",
Message = "Digital VTX detected with an Analog-only FC/Camera setup.",
Severity = RuleSeverity.Warning,
Check = (parts) =>
{
var vtx = parts.FirstOrDefault(p => p.Category == ComponentCategory.VTX);
var cam = parts.FirstOrDefault(p => p.Category == ComponentCategory.Camera);
if (vtx == null || cam == null) return true;
var vSpecs = SpecValidator.GetTypedSpecs(vtx) as VTXSpecs;
var cSpecs = SpecValidator.GetTypedSpecs(cam) as CameraSpecs;
return vSpecs?.Protocol == cSpecs?.Protocol;
}
};
To guarantee structural signals are valid before physical assembly, this engine tracks mismatch states between digital and analog transmission lines. If a high-bandwidth digital system (e.g., DJI O3, Walksnail) is matched with legacy components, the builder is immediately alerted via production warning workflows.
🔒 Project source code repository is currently private.